Будущее спасательных операций и исследований может быть связано с роями легких, мягких и интеллектуальных роботов. Представьте себе группы мягкотелых роботов, работающих с согласованной эффективностью муравьиной колонии для навигации в сложных и непредсказуемых условиях, плавно перемещающихся между мутными водами, илистыми берегами и неровными препятствиями для доставки essential грузов.
В отличие от своих жестких промышленных аналогов, мягкие роботы создаются из податливых материалов, которые обеспечивают remarkable деформируемость и адаптивность. Это позволяет им преодолевать ограниченные пространства и безопасно взаимодействовать с хрупкими средами и биологическими тканями, открывая transformative потенциал для применения в поисково-спасательных операциях, мониторинге экосистем и targeted медицинских процедурах.
Однако значительное технологическое ограничение impeded широкое и практическое развертывание этих машин. Современное поколение мягких роботов часто excels primarily в highly специализированных нишах. Большинство из них designed реагировать на single внешний стимул—такой как свет, тепло или магнитное поле—и typically optimized для работы в single среде, например либо на суше, либо в воде.
Более profound вызов возникает при попытках интегрировать multiple responsive механизмы: простое сочетание, например, термочувствительного материала с магнитным приводом often leads к conflicting сигналам и internal interference, вызывая unreliable actuation и потерю precise контроля.
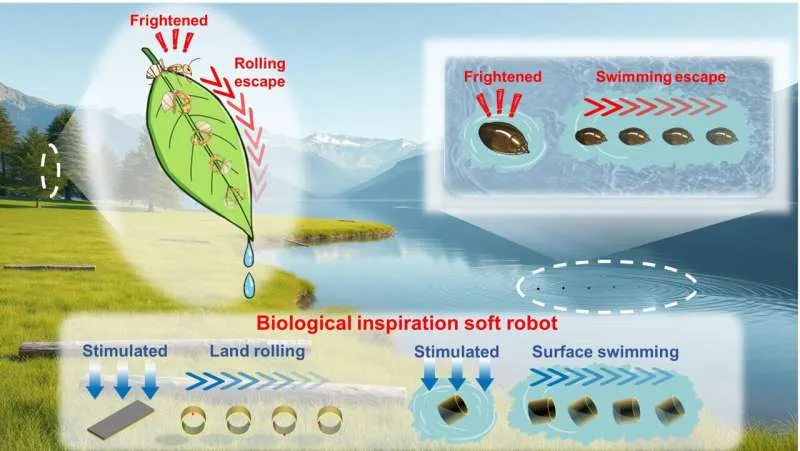
Решение этой complex проблемы было найдено в природном мире. Насекомые, такие как муравьи и вертячки, являются masters навигации по разным terrain. Их действия governed continuous, synergistic интерпретацией их окружения.
Этот принцип synergistic ответа inspired исследования, проведенные в Guangdong University of Technology. Их цель состояла в том, чтобы создать мягкого робота, который мог бы воспринимать и реагировать на multiple environmental сигналы simultaneously, подобно своим biological аналогам.
Решение команды focused на создании novel, multi-слоенного composite фильма, который функционирует как advanced "искусственная мышца". Процесс fabrication является iovative и sophisticated. Они начали с common полиимидной (PI) пленки и применили controlled химическую модификацию с использованием strong щелочи.
Следующий шаг involved внедрение неодимовых железных борных (NdFeB) магнитных частиц в отдельный силиконовый rubber слой, который затем bonded к PI-PAA пленке. Этот final слой добавляет third, powerful ответ на external магнитные поля, enabling precise удаленное steering и propulsion.
Возможности, enabled этим design, являются remarkable. Получившийся робот, weighing mere 8 миллиграмм, exhibits уровень ловкости и силы, который belie его minuscule размер. Он достигает impressive скоростей до 9,6 см/с на поверхности воды.
Направляемый rotating магнитным полем, он выполняет robust rolling походку, enabling ему подниматься по склонам, переходить из-под воды на сушу и navigat сложные полосы препятствий. Perhaps наиболее compelling демонстрацией его utility является его cargo transport способность.
В эксперименте робот транспортировал небольшой камень по challenging пути, включающему подводное путешествие, подъем на сушу и final возвращение в воду. По прибытии в пункт назначения кратковременное воздействие ближнего инфракрасного света—который locally нагревает робота—triggered запрограммированное изменение формы, заставляя его развернуться и release его cargo точно.
Это исследование представляет собой important продвижение от специализированных прототипов к general-purpose мягким роботам. Успешная демонстрация triple-ответного, амфибийного мягкого робота, способного выполнять complex задачи, открывает новые возможности для развертывания мягких роботов в средах, которые в настоящее время слишком опасны или inaccessible для людей или conventional роботов.