Роботы способны выполнять задачи в реальном мире, такие как поисково-спасательные операции, инспекции и ремонт, но их автономная навигация в сложных и неизвестных условиях остается вызовом. Традиционные системы, полагающиеся на GPS, часто оказываются неэффективными в таких средах, как пещеры, завалы или подземные сооружения.
Исследователи из Пекинского технологического института представили инновационную систему навигации, вдохновленную природой, которая позволяет роботам ориентироваться в сложных условиях без использования GPS. Эта система объединяет три биологические стратегии, наблюдаемые у насекомых, птиц и грызунов, преодолевая ограничения отдельных подходов.
"Наша работа вызвана существенным пробелом в области биоинженерных роботов", – отмечает Шейкдер Чандан, ведущий автор исследования. "Многие исследования фокусировались на отдельных навигационных стратегиях животных, но упускали такой фундаментальный биологический принцип, как 'дегенеративность'. В природе надежная навигация обеспечивается иерархической интеграцией множества функционально пересекающихся, но не идентичных стратегий".
Единый нейроморфный фреймворк
Вместо создания системы, основанной на одной стратегии, команда разработала унифицированный нейроморфный фреймворк, объединяющий лучшие практики из разных видов. Система эмулирует биологические процессы, отвечающие за навигацию у насекомых, птиц и грызунов.
"Мы стремились синтезировать наиболее эффективные стратегии из этих трех групп животных в единую систему, чтобы напрямую устранить основные ограничения традиционной навигации, такие как хрупкость сенсоров и высокое энергопотребление, особенно в сложных средах без GPS", – говорит Чандан.
Фреймворк состоит из трех ключевых биоинспирированных компонентов:
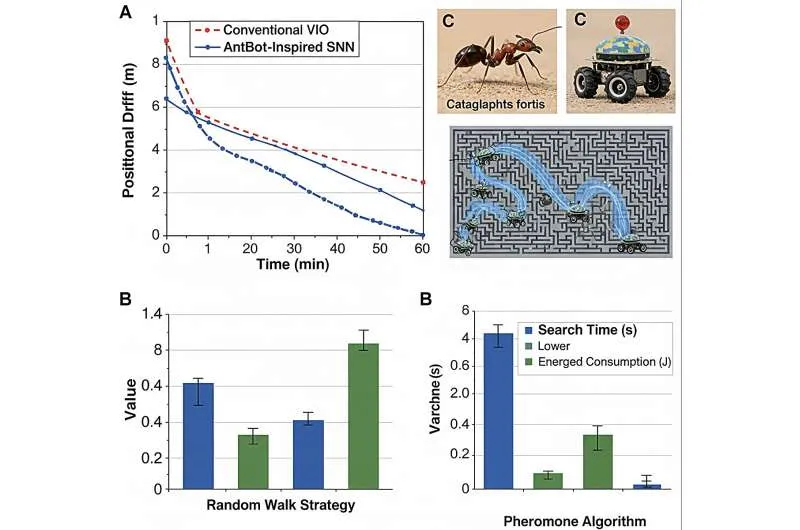
- Интегратор пути, вдохновленный насекомыми: Эта подсистема, реализованная на низкоэнергетическом нейроморфном оборудовании в виде спайковой нейронной сети, действует как надежный внутренний счетчик шагов для эгоцентрического отслеживания.
- Система мультисенсорного слияния, вдохновленная птицами: Имитируя миграционных птиц, эта система динамически объединяет данные от квантового магнитометра, поляризационного компаса и зрения с помощью байесовского фильтра. Это обеспечивает надежное определение курса даже при отказе одного из датчиков.
- Картографическая система, вдохновленная грызунами: Эта система создает пространственную память, обновляя карту только при обнаружении значимых ориентиров, что отражает энергоэффективность гиппокампа мозга.
Испытания и результаты
Для оценки потенциала своей системы исследователи провели обширные полевые испытания с участием 23 различных роботизированных платформ в реальных условиях, включая заброшенные шахты и густые леса. Система была протестирована на параллельность с традиционными SLAM-алгоритмами (Simultaneous Localization and Mapping).
"Система продемонстрировала снижение позиционного дрейфа на 41%, повышение энергоэффективности до 60% и ускорение восстановления после сбоев датчиков на 83%", – сообщил Чандан. "Ее уникальное преимущество – "дегенеративность": при нарушении работы одного компонента другие бесшовно берут на себя его функции, обеспечивая уровень отказоустойчивости, недоступный изолированным системам".
Потенциальные приложения
Разработанная архитектура позволила роботам успешно ориентироваться в сложных и неструктурированных средах. "Мы не просто улучшили отдельный алгоритм; мы создали новую системную парадигму, которая по своей сути более устойчива", – подчеркнул Чандан. "В количественном выражении это привело к одновременному значительному повышению точности, энергоэффективности и надежности на различных роботизированных платформах".
В будущем этот фреймворк может быть усовершенствован и внедрен на большем количестве роботизированных систем, что позволит им надежно выполнять миссии в непредсказуемых условиях. Это может включать такие области, как реагирование на стихийные бедствия (например, навигация в разрушенных зданиях), исследование планет и глубоководные миссии, где традиционные GPS и идеальное зондирование недоступны.
Дальнейшее развитие
Исследователи планируют дальнейшие исследования для устранения выявленных ограничений. В частности, они хотят интегрировать обучение на чипе и непрерывное обучение, чтобы сделать навигацию роботов еще более реалистичной и адаптивной. "В настоящее время веса нашей системы в значительной степени предопределены, но биологические системы постоянно учатся и адаптируются через синаптическую пластичность", – добавил Чандан. "Мы планируем изучить новые технологии, такие как мемристорные синапсы, чтобы интегрировать эту возможность непосредственно в аппаратное обеспечение".
Кроме того, команда стремится масштабировать систему для работы в километровых масштабах, что потребует разработки более сложных схем организации памяти для эффективного управления большими пространственными картами. Конечная цель – создание роботов, которые не просто имитируют отдельные аспекты поведения животных, но и воплощают непрерывное обучение и масштабируемость биологического интеллекта.