В условиях обрушившихся шахт или разрушенных зданий роботам-спасателям необходимо мгновенно создавать карты местности и определять свое местоположение для эффективной навигации. Современные модели машинного обучения, использующие изображения с камер робота, ограничены в обработке данных, что делает их малопригодными для реальных катастроф, где каждая секунда на счету.
Исследователи из Массачусетского технологического института (MIT) разработали инновационную систему, объединяющую последние достижения в области искусственного интеллекта и классического компьютерного зрения. Эта система способна обрабатывать неограниченное количество изображений, создавая точные 3D-карты сложных помещений, таких как офисные коридоры, всего за несколько секунд.
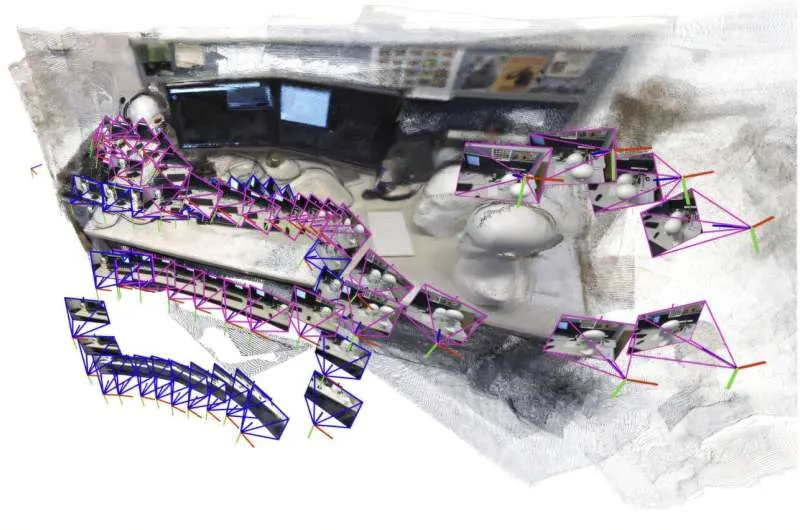
Разработанный подход основан на инкрементальном создании и выравнивании небольших фрагментов карты (субкарт), которые затем объединяются для формирования полной 3D-модели. Важно отметить, что система в режиме реального времени оценивает положение робота, не требуя предварительной калибровки камер или сложной настройки.
Простота реализации, высокая скорость и качество 3D-реконструкций делают эту методику идеальной для масштабирования в реальных приложениях. Помимо спасательных роботов, технология может быть применена для создания приложений дополненной реальности для носимых устройств, таких как VR-шлемы, или для оптимизации логистики на складах.
«Чтобы роботы могли выполнять всё более сложные задачи, им нужны более сложные представления окружающего мира. При этом важно, чтобы внедрение этих представлений не становилось излишне трудоемким. Мы продемонстрировали возможность создания точной 3D-реконструкции за считанные секунды с помощью инструмента, который работает 'из коробки'», — отмечает Доминик Маджио, ведущий автор исследования.
Разработка представляет собой прорыв в области одновременной локализации и картографирования (SLAM). В то время как традиционные методы оптимизации часто терпят неудачу в сложных условиях или требуют предварительной калибровки, а современные модели машинного обучения имеют ограничения по объему обрабатываемых данных, новая система предлагает гибкое и масштабируемое решение.
Суть метода заключается в генерации множества небольших субкарт, которые затем «склеиваются» вместе. Это позволяет обрабатывать большие сцены значительно быстрее, даже если модель обрабатывает лишь небольшое количество изображений за один раз. Для решения проблемы неточностей, вносимых моделями машинного обучения при выравнивании субкарт, исследователи применили более гибкий математический подход, заимствованный из классического компьютерного зрения.
Система, получившая название VGGT-SLAM, продемонстрировала скорость и точность, превосходящие существующие аналоги, с погрешностью реконструкции менее 5 сантиметров. Исследователи уверены, что дальнейшая доработка метода позволит повысить его надежность в особо сложных условиях и внедрить на реальных роботах.