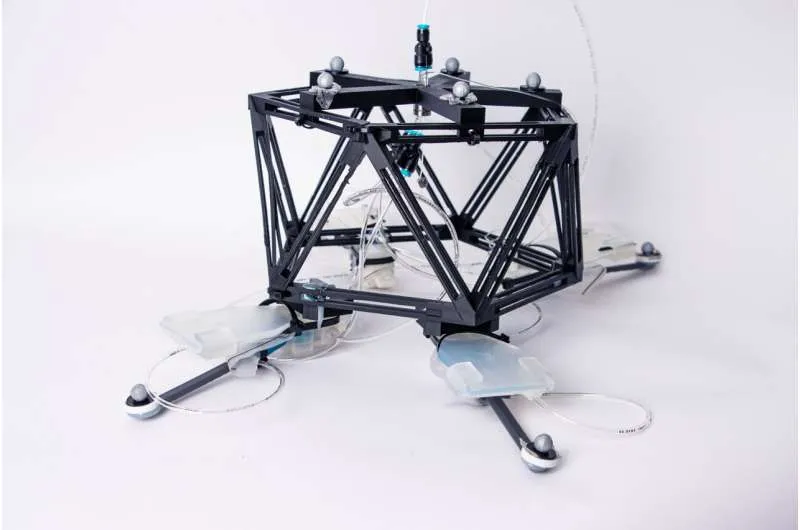
Ученые из Оксфордского университета представили новое поколение мягких роботов, которые функционируют без электроники, моторов и компьютеров, используя исключительно давление воздуха. Эти «флюидные роботы», как показано в исследовании, опубликованном в Advanced Materials, способны генерировать сложные ритмичные движения и даже автоматически синхронизировать свои действия.
Профессор Антонио Форте из Департамента инженерных наук Оксфордского университета отметил: «Мы воодушевлены тем, что машины без «мозга» могут спонтанно проявлять сложное поведение, распределяя функциональные задачи на периферии и высвобождая ресурсы для более интеллектуальных задач».
Мягкие роботы, созданные из гибких материалов, идеально подходят для задач, требующих навигации по неровной местности или деликатного обращения с объектами. Одной из ключевых целей в разработке мягкой робототехники является встраивание поведения и механизмов принятия решений непосредственно в физическую структуру робота, что позволяет создавать более адаптивные и отзывчивые машины.
Такое автоматическое поведение, возникающее из взаимодействия тела и окружающей среды, часто сложно воспроизвести с помощью традиционных электронных схем, требующих сложного датчикового оборудования, программирования и систем управления.
Для решения этой задачи исследователи черпали вдохновение в природе, где части тела часто выполняют несколько функций, а синхронное поведение может возникать без централизованного управления. Их ключевым новшеством стало создание небольшого модульного компонента, который использует давление воздуха для выполнения механических задач — подобно тому, как электронная схема использует электрический ток. В зависимости от конфигурации, этот простой блок может:
- Действовать (двигаться или деформироваться) в ответ на изменения давления воздуха — функционируя как мышечный элемент.
- Чувствовать изменения давления или контакт — подобно датчику касания.
- Переключать поток воздуха между состояниями ВКЛ/ВЫКЛ — подобно клапану или логическому элементу.
Подобно деталям конструктора LEGO, множество идентичных модулей (размером всего несколько сантиметров) можно соединять для создания различных роботов без изменения базовой аппаратной конструкции. В рамках исследования были созданы настольные роботы (примерно с обувную коробку), способные прыгать, трястись или ползать.
В одной из конфигураций исследователи обнаружили, что каждый отдельный модуль может автоматически выполнять все три функции одновременно, позволяя ему генерировать ритмичное движение полностью самостоятельно при постоянном давлении. Когда несколько таких отзывчивых модулей соединяются вместе, их движения начинают естественно синхронизироваться без какого-либо компьютерного управления или программирования.
Эти возможности были использованы для создания робота-трясуна (способного сортировать шарики по разным контейнерам, наклоняя вращающуюся платформу) и робота-ползуна (который мог обнаруживать край стола и автоматически останавливаться, предотвращая падение). В каждом случае скоординированные движения достигались исключительно механически, без внешнего электронного управления.
Ведущий автор доктор Мостафа Моуса из Департамента инженерных наук Оксфордского университета пояснил: «Эта спонтанная координация не требует заранее заданных инструкций, а возникает исключительно из способа соединения модулей друг с другом и их взаимодействия с окружающей средой».
Важно отметить, что синхронизированное поведение наблюдается только тогда, когда роботы соединены друг с другом и касаются поверхности. Исследователи использовали математическую модель, называемую моделью Курамото, которая описывает синхронизацию сетей осцилляторов, для объяснения этого явления.
Было показано, что сложное, скоординированное движение может возникать у роботов исключительно благодаря их физической конструкции при механическом соединении через окружающую среду. В данном случае движение каждой ноги робота тонко влияет на другие через общий корпус и силы реакции опоры.
Это создает петлю обратной связи, где силы, передаваемые через трение, сжатие и отскок, связывают движения конечностей вместе, что приводит к спонтанной координации.
Доктор Моуса добавил: «Точно так же, как светлячки могут начать мигать синхронно, наблюдая друг за другом, пневматические конечности робота также входят в ритм, но в данном случае через физический контакт с поверхностью, а не через визуальные сигналы. Такое эмерджентное поведение ранее наблюдалось в природе, и это новое исследование представляет собой крупный шаг вперед на пути к программируемым, самоинтеллектуальным роботам».
Хотя разработанные мягкие роботы в настоящее время находятся в настольном масштабе, принципы проектирования, по словам исследователей, не зависят от масштаба. В ближайшем будущем исследователи планируют изучить эти динамические системы для создания энергоэффективных автономных локомоторов. Это стало бы шагом к широкомасштабному развертыванию этих роботов в экстремальных условиях, где энергия ограничена, а адаптивность имеет решающее значение.
Профессор Форте добавил: «Встраивание принятия решений и поведения непосредственно в физическую структуру робота может привести к созданию адаптивных, отзывчивых машин, которым не нужен программный код для «мышления». Это переход от «роботов с мозгами» к «роботам, которые сами являются своими мозгами». Это делает их быстрее, эффективнее и потенциально лучше во взаимодействии с непредсказуемыми средами».