Исследователи из Института интеллектуальных систем Макса Планка и Цюрихского федерального политехнического института разработали инновационный беспроводной метод управления жесткостью микроскопических структур. Эта технология, основанная на явлении магнитного сцепления (jamming), открывает новые горизонты для мик-робототехники, позволяя крошечным объектам мгновенно менять свое состояние из гибкого в твердое и обратно, что потенциально может быть использовано даже для деликатных процедур внутри человеческого тела.
В то время как в музыке «jamming» означает спонтанное объединение музыкантов, в физике этот термин описывает переход вещества из жидкого состояния в твердое. Ученые научились управлять этим процессом, используя магнитные поля. В отличие от традиционных вакуумных систем, требующих насосов и трубок, новый подход работает без проводов и физического контакта.
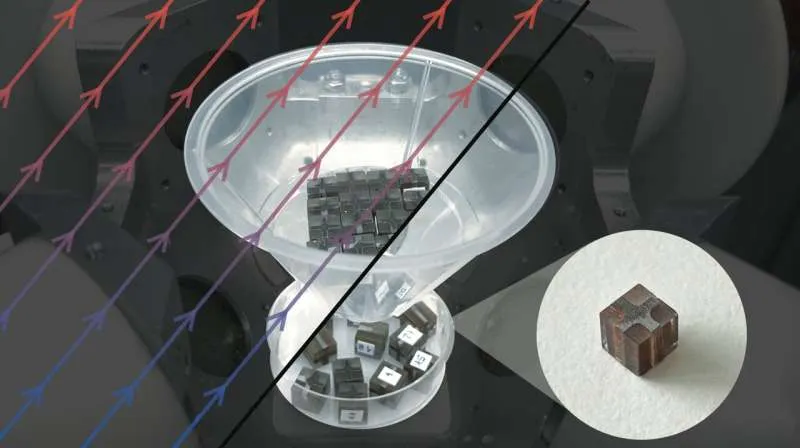
«Мы объединили магнитные и немагнитные материалы в композитные частицы, которые могут притягиваться и сцепляться по команде», — поясняет Бусе Акташ, руководитель исследовательской группы. «Когда магнитное поле выключается, они легко распадаются. Это обратимое и программируемое сцепление позволяет нам удаленно настраивать механические свойства материалов».
В ходе исследования, опубликованного в журнале Nature Communications, были представлены магнитные композитные частицы размером в несколько миллиметров. Путем изменения конфигурации магнитного поля частицы могут объединяться в линии, поверхности или объемные структуры. Это позволяет удаленно управлять сборкой, затвердеванием, расслаблением или распадом объектов.
Текущие прототипы имеют миллиметровый размер, однако команда нацелена на масштабирование системы до микрометрового уровня. «Вакуумные или другие проводные методы активации плохо масштабируются», — отмечает Акташ. «Но с помощью магнетизма мы можем уменьшать размеры строительных блоков, сохраняя контроль над их поведением. Это новая стратегия для достижения беспроводного, обратимого механического контроля в малых масштабах, закладывающая основу для будущих инструментов в мик-робототехнике, умных материалах, биомедицинских системах и микроманипуляциях».