Разработка носимых роботов, напоминающих одежду, сделала важный шаг вперед благодаря созданию оборудования, способного непрерывно и автоматически ткать сверхтонкую пряжу из сплава с памятью формы. Эта технология позволяет создавать легкие и гибкие "тканевые мышцы", пригодные для массового производства.
Исследовательский центр передовой робототехники при Корейском институте машиностроения и материалов (KIMM) под руководством ведущего научного сотрудника Чеола Хуна Парка разработал автоматизированную систему ткачества, обеспечивающую непрерывное массовое производство тканевых мышц — легких, но мощных искусственных мышечных актуаторов.
Новая система использует проволоку из сплава с памятью формы (SMA) диаметром 25 мкм — примерно в четыре раза тоньше человеческого волоса. Эта проволока перерабатывается в пряжу в форме спирали, что позволяет осуществлять непрерывное ткачество тканевых мышц. Такой материал весом всего 10 граммов способен поднимать 10–15 кг, что делает его идеальным основным актуатором для носимых роботов в виде одежды.
Ранее разработанная KIMM пряжа из SMA-спирали использовала металлическую сердцевину, что приводило к низкой удлиняемости и затрудняло автоматическое ткачество. Чтобы преодолеть это ограничение, команда KIMM заменила металлическую сердцевину натуральным волокном, переработала структуру и процесс изготовления тканевой мышцы, а также улучшила конструкцию ткацкого станка, добившись тем самым стабильного и непрерывного массового производства.
Традиционные носимые роботы, предназначенные для поддержки нескольких суставов (например, локтя, плеча и талии), полагались на тяжелые, шумные моторные или пневматические актуаторы. Это делало их громоздкими, дорогими и неудобными для длительного использования, ограничивая поддержку только конкретными суставами.
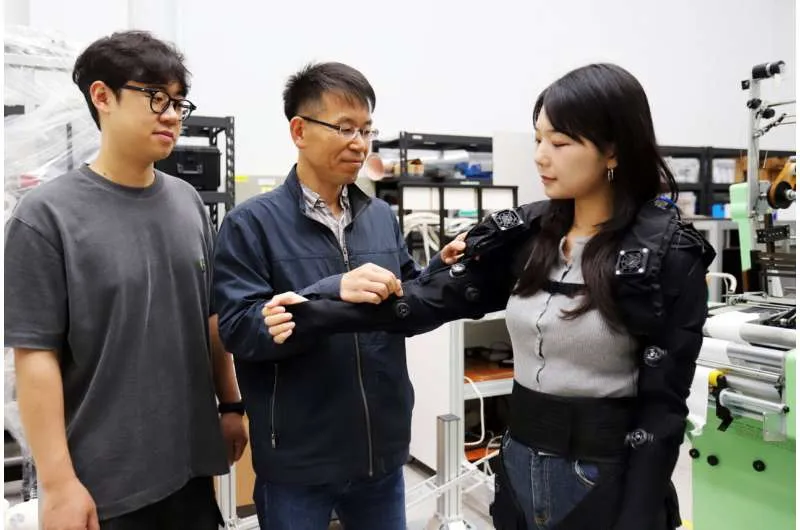
Активная поддержка плеча представляла особую сложность из-за его сложной амплитуды движений. В отличие от этого, разработанные KIMM тканевые мышечные актуаторы легки и гибки, что позволяет им естественно прилегать к телу и активно поддерживать несколько сложных суставов одновременно. Используя эту технологию, исследовательская группа создала первый в мире носимый робот в виде одежды весом менее 2 кг, который одновременно поддерживает локоть, плечо и талию, снижая мышечные усилия более чем на 40% при выполнении повторяющихся физических задач.
Кроме того, команда разработала сверхлегкий робот-помощник для плеча весом всего 840 граммов, который пациенты с мышечной слабостью могут комфортно носить и использовать в повседневной жизни.
В клинических испытаниях, проведенных в Больнице Сеульского национального университета (SNUH) на пациентах с мышечной слабостью, включая пациентов с мышечной дистрофией Дюшенна, носимый робот-помощник для плеча улучшил диапазон движений плеча более чем на 57%.
Благодаря возможности непрерывного производства высококачественных, однородных тканевых мышц с помощью автоматизированной системы ткачества, исследовательская группа заложила основу для коммерциализации носимых роботов в виде одежды. Этот прорыв призван снизить физическую нагрузку на работников, улучшить качество жизни пациентов и ускорить широкое внедрение носимых роботов, тем самым повысив конкурентоспособность промышленности.
В частности, робот-помощник для плеча, разработанный для поддержки реабилитации и повседневной деятельности пациентов с мышечной слабостью, призван снизить нагрузку на опекунов, одновременно улучшая независимость, качество жизни, самооценку и общее самочувствие пациентов.
"Наша разработка технологии непрерывного массового производства тканевых мышц — ключевого компонента носимых роботов в виде одежды — значительно улучшит качество жизни в таких областях, как здравоохранение, логистика и строительство", — заявил доктор Чеол Хун Парк, ведущий научный сотрудник Центра передовой робототехники KIMM. „Мы продолжим развивать обширные технологии KIMM в области носимой робототехники, чтобы ускорить коммерциализацию и занять лидирующие позиции на мировом рынке носимых роботов".
Это исследование получило награду KIMM Best Research Award 2024.