Ученые разработали гибкую роботизированную кожу, которая позволяет крошечным роботам-лианам, шириной всего несколько миллиметров, успешно перемещаться по извилистым траекториям и в хрупких средах. Для достижения этой цели исследователи интегрировали тончайший слой актуаторов из жидкокристаллического эластомера в стратегически важные точки мягкой оболочки робота. Управление движением осуществляется путем контроля давления внутри корпуса робота и температуры актуаторов.
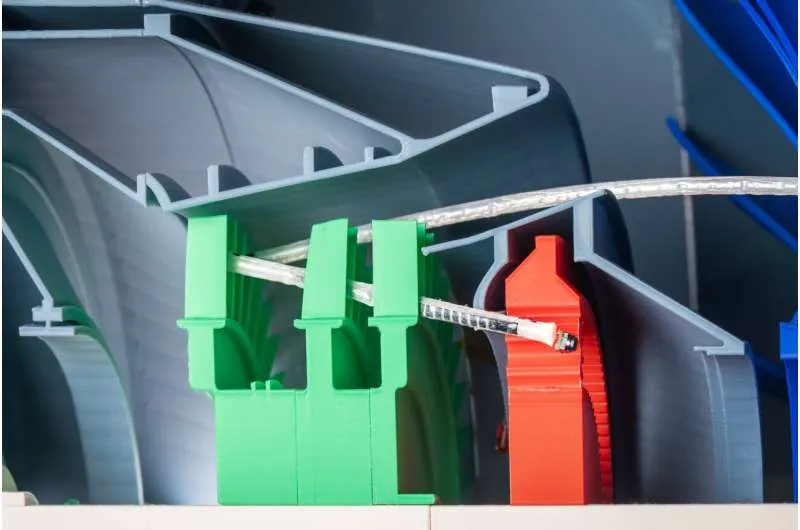
Исследовательская группа продемонстрировала, что робот, оснащенный такой роботизированной кожей, смог пройти через модель артерий человеческого тела, а также успешно маневрировал внутри модели турбины реактивного двигателя. Результаты работы были опубликованы в журнале Science Advances.
«Наша работа — это шаг к созданию миниатюрных, управляемых, мягких роботов-лиан, способных работать в деликатных и ограниченных пространствах», — отметила Таня К. Моримото, доцент кафедры механической и аэрокосмической инженерии Калифорнийского университета в Сан-Диего и ведущий автор статьи.
В настоящее время управляемые роботы-лианы существуют в более крупных масштабах — от сантиметров до метров. Их управление обычно осуществляется с помощью пневматических актуаторов, двигателей или тросов. Однако эти методы становятся трудными для реализации или малоэффективными при уменьшении размеров роботов.
Исследователи преодолели эти ограничения, интегрировав серию актуаторов из жидкокристаллического эластомера в определенные участки мягкой роботизированной оболочки. Эти актуаторы отличаются высокой прочностью при минимальной толщине, что делает их идеальными для управления миниатюрными роботами. Управлять роботом можно с помощью температуры, давления или их комбинации. Как показало исследование, последний вариант оказался наиболее эффективным. Команда встроила небольшие гибкие нагревательные элементы для регулирования температуры актуаторов и разработала систему точной настройки внутреннего давления робота для обеспечения управляемости.
Испытания новой роботизированной кожи проводились на гибком роботе-лиане диаметром от 3 до 7 миллиметров и длиной около 25 сантиметров. Эти роботы способны расти путем выворачивания своей оболочки наизнанку.
Исследование показало, что робот способен совершать несколько изгибов более чем на 100 градусов по всей длине тела при активации актуаторов. Он также смог протискиваться через узкие проходы, включая те, ширина которых составляла половину его диаметра. Например, исследователи успешно провели робота-лиану через модель аорты человека и соединенных с ней артерий. Также робот был оснащен камерой для инспекции различных участков внутри сложной модели реактивного двигателя.
«Разработанная в рамках данной работы мягкая кожа может быть адаптирована для других различных мягких роботизированных систем, таких как носимые тактильные устройства, мягкие захваты и локомотивные мягкие роботы», — поделился Сукджун Ким, научный сотрудник лаборатории Моримото. В дальнейших планах — обеспечение возможности дистанционного управления или автономной работы робота, а также его дальнейшее миниатюризация.