Исследователи из Университета Тоёхаси изучали, как люди чувствуют себя, передавая посылки автономным роботам-доставщикам во время движения. Это важно для будущих умных городов.
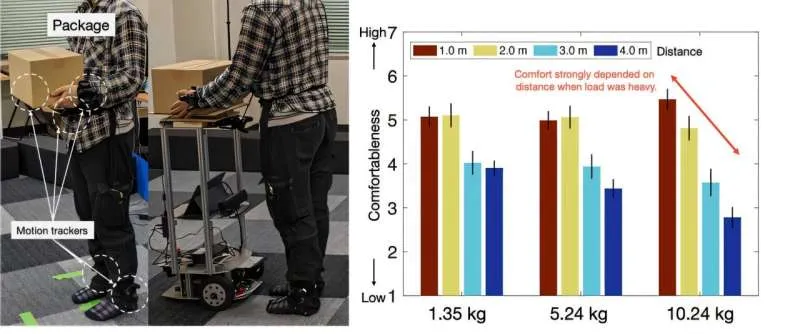
Результаты показали, что люди чувствуют себя комфортнее, когда робот подходит ближе, и испытывают дискомфорт, когда он держится на расстоянии. Эта тенденция усиливалась, если пакет был тяжелым.
Когда робот приближался, участники исследования замедляли шаг или останавливались, проявляя некоторую нерешительность. Это говорит о том, что люди воспринимают роботов как «партнеров», а не просто машины. Правильное расстояние и дизайн движения робота важны для комфортного взаимодействия.
Исследование комфорта и поведения
Автономные мобильные роботы всё чаще используются в логистике и сфере услуг. Однако до сих пор не до конца понятно, какие расстояния и модели движения делают людей комфортными и безопасными при совместной работе с роботами. Особенно важно, как траектория движения и место остановки робота влияют на восприятие человека, когда он подходит, чтобы передать посылку.
В связи с этим, исследование ставило целью выяснить поведенческие особенности и субъективный комфорт людей при передаче посылок автономному роботу. Были проведены три психофизических эксперимента.
В первом эксперименте изучалось, как меняется походка людей в зависимости от близости подхода робота. Выяснилось, что на близком расстоянии участники двигались осторожнее и иногда останавливались.
Во втором эксперименте исследовалась роль веса посылки в ощущении комфорта. Было обнаружено, что люди чувствовали себя лучше, когда робот подходил близко, особенно с тяжелой посылкой. Напротив, когда робот стоял на расстоянии, участники испытывали дискомфорт.
В третьем эксперименте сравнивались люди, знакомые с роботами, и те, кто с ними не сталкивался. Значимых различий в оценках комфорта между группами не было.
Выводы для сотрудничества человека и робота
Эти результаты позволяют предположить, что люди воспринимают приближение робота как действие, направленное на помощь, а не просто механическое движение. Таким образом, тщательно продумывая расстояние подхода и паттерны движения робота, можно создать такое его поведение, которое будет вызывать у людей больше комфорта и уверенности.
Исследование дает фундаментальные представления для построения общества, в котором люди и роботы могут безопасно и комфортно взаимодействовать.
Доцент Хидэки Тамура отметил: «Автономные мобильные роботы всё чаще применяются в логистике, доставке еды и обслуживании в ресторанах. Чтобы эти роботы стали привычными и принятыми в нашей повседневной жизни, их движения должны восприниматься людьми естественно и комфортно. Мы верим, что, учитывая когнитивные и поведенческие характеристики человека при проектировании движений робота, можно достичь более комфортного сосуществования людей и роботов».
Перспективы на будущее
В дальнейшем команда планирует провести исследования в более реалистичных условиях, чтобы изучить, как различные факторы — внешний вид робота, его размер, звуки, скорость и направление движения — влияют на восприятие и комфорт человека. На основе этих данных исследователи намерены разработать основу для создания такого поведения роботов, которое обеспечит безопасное и комфортное сотрудничество в различных сценариях.