Роботы не всегда отличаются особой деликатностью при работе с хрупкими предметами. Им не хватает той лёгкости прикосновения, которая свойственна человеку. Однако эта ситуация может измениться благодаря новому прорыву в области умных материалов.
Исследователи разработали технологию создания гибких волокон, управляемых магнитным полем. Это открывает возможности не только для роботизированных манипуляторов, способных поднимать такие объекты, как мягкие фрукты, картофельные чипсы или червей, но и для широкого спектра других применений. Среди них – перчатки, обеспечивающие реалистичные тактильные ощущения в виртуальной реальности, а также «дышащие» ткани.
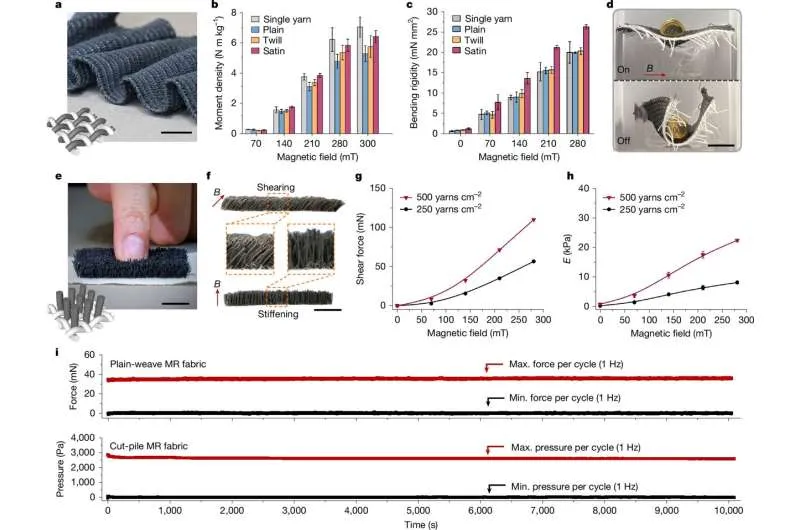
Создание нового типа умного волокнаВ статье, опубликованной в журнале Nature, учёные подробно описывают процесс создания своего умного текстиля, способного изгибаться, становиться жёстче или менять текстуру поверхности по команде. Сначала команда внесла крошечные, мягкие магнитные частицы (карбонильное железо) в чрезвычайно тонкие и гибкие волокна полимера, LDPE (полиэтилен низкой плотности).
Чтобы преодолеть сложности в создании одновременно тонкого и насыщенного магнитными материалами волокна, исследователи применили процесс, известный как melt spiing (формование из расплава). Эта высокоскоростная техника позволила им получить волокна диаметром всего 57 микрометров.
Следующим этапом стало скручивание семи таких волокон в спиральную нить. Важность такой формы заключается в её способности реагировать на магнитное поле, исходящее с любого направления. Именно это кардинально отличает материал от других умных аналогов.
От скалярного к векторному управлениюВ отличие от простых реакций типа «вкл/выкл» (например, нагрев или затвердевание при подаче напряжения), которые относятся к скалярному управлению, спиральная структура обеспечивает материалу векторное управление. Это означает, что он может реагировать на силу и направление магнитного поля, что позволяет осуществлять более сложные движения.
«Наша работа даёт представление о волокнистых материалах, реагирующих на внешние стимулы, выводя их из области скалярного управления на уровень продвинутого векторного контроля, что знаменует собой новую эру в инновациях текстиля», — пишут исследователи в своей статье.
Применение в реальном миреКоманда создала два типа тканей из полученной пряжи. Тканый текстиль, который лучше всего подходит для сгибания и растяжения, и ткань с петлевой структурой (cut-pile), напоминающую мягкую щётку на ощупь и внешний вид. Из тканого текстиля был изготовлен патч, который автоматически открывает и закрывает крошечные вентиляционные щели при циклическом включении и выключении магнитного поля. Это может использоваться для мгновенного регулирования потоотделения и теплообмена.
Из ткани с петлевой структурой был собран мягкий роботизированный захват. Поскольку тысячи магнитных волокон могут индивидуально уплотняться и принимать форму объекта, захват позволяет роботам безопасно и бережно поднимать деликатные предметы.
Кроме того, исследователи создали перчатку для тактильной обратной связи в виртуальной реальности. При захвате виртуального объекта удалённое магнитное поле уплотняет волокна или прижимает их к коже, имитируя реальные тактильные ощущения.
Следующий шаг команды — усовершенствование материалов для коммерческого использования, обеспечение их долговечности и безопасности для комфортной повседневной одежды.